Building FPGA Gateware with Verilog and Amaranth: A Tutorial¶
This page takes the reader through a hands-on tutorial on FPGA, Verilog and Amaranth.
Field Programmable Gate Arrays are fascinating devices that can efficiently perform all kinds of computing tasks. A configuration for and FPGA is known as ‘gateware’.
There are a variety of ways to configure FPGAs. Verilog is perhaps the most well known and best supported. Learning Verilog is good way to begin to understand how FPGAs work.
It is possible to write CFUs in Verilog, but for more sophisticated CFUs we use Amaranth to generate Verilog.
Getting Help¶
Try not to get stuck for long periods of time. Generally, you’ll learn more quickly by getting help from someone who has done it before rather than struggling yourself for long periods of time. See: How To Get Help.
Before You Begin¶
Obtain Equipment¶
Obtain the following:
An Arty A7-35T (as per the Setup Guide).
A PMOD AMP2. PMOD is a connector standard for FPGA dev boards. PMOD AMP2 is a simple audio output board. (Digikey , Element 14)
Speaker with 3.5mm plug. Obtain this from eBay or any electronics store.
Optional: UPduino. A small FGPA dev board which will make the Amaranth tutorial a little easier and faster. (Order from tindie.) * The UPduino often goes out of stock and sometimes delivery times are long. * It’s more than possible to run the tutorial from an Arty A7.
Micro-USB cable. You probably already have one.
Set Up¶
Follow the instructions at Setup Guide to set up Vivado and the CFU Playground.
Part 1: Verilog Programming With Xilinx Vivado¶
- Verilog
… is a hardware description language (HDL) used to model electronic systems. It is most commonly used in the design and verification of digital circuits at the register-transfer level of abstraction.
– Wikipedia: Verilog
- Vivado Design Suite
is a software suite produced by Xilinx for synthesis and analysis of HDL designs Vivado Design Suite took 1000 person-years and cost US$200 million.
– Wikipedia: Xilinx Vivado
Getting Familiar with The Arty A7¶
Work though tcal-x’s Arty tutorials at github.com/tcal-x/misc <https://github.com/tcal-x/misc>. To do tutorial 2 you will either need to git clone the repo or download the top.bit file
Board Definition file¶
The board definition file tells Vivado about the eval board you’re using - which LEDs and switches are connected and to which pins of the FPGA.
Download master.zip to your Downloads directory.
Now, unzip the file and copy do your Xilinx directory
$ cd ~/Downloads
$ unzip master.zip
$ cd ~/Downloads/vivado-boards-master/new
$ cp -r board_files/ ~/tools/Xilinx/Vivado/2020.1/data/boards/
Your First Verilog Program¶
Start Vivado from the Linux Application menu, then follow along with this YouTube video from Graham Chow: Verilog using Vivado on Digilent Arty Xilinx FPGA.
This video is for a slightly older version of Arty and Vivado, so watch out for changed menu item names and so forth.
For board, choose Arty A7-35T
Make a subdirectory for all your vivado projects. For example, if you were to choose
~/vivado, then this project’s files would be stored in~/vivado/project_1.XDC files:
XDC files are linked from the Arty A7 Reference page
Download Arty-A7-35-Master.xdc into your project’s folder.
From the “Add Sources” dialog, make sure you choose “Add or create constraints”
Graham says “top’s always pretty popular”. Verilog designs are hierarchical, so the name “top” is often used for the top of the hierarchy.
At the programming step, you’ll find the generated bitstream in the “runs” directory. For example, on
avg’s machine, the file was at:/home/avg/vivado/project_1/project_1.runs/impl_1/top.bit
Here is the code Graham uses:
module top(
input CLK100MHZ,
output reg [3:0] led,
input [3:0] sw
);
always @ (posedge CLK100MHZ)
begin
if (sw[0] == 0)
begin
led <= 4'b0000;
end
else
begin
led <= 4'b1111;
end
end
endmodule
This downloadable guide from Xilinx contains more information about using Vivado: UG892 - Vivado Design Suite User Guide: Design Flows Overview.
FPGA4Fun - Introductory material¶
fpga4fun.com is full of well researched material relevant to FPGA beginners, presented in a - well, fun - manner. It is (by far) the best online introduction to FPGAs we have found.
Start off by reading through the material under FPGA introduction in the left hand menu (scroll way down). The most relevant pages are:
FPGA4Fun - Music Box¶
The Music box tutorials will teach you the basics of Verilog and how FPGAs do computation. Instead of putting things together on a breadboard, we’ll use a PMOD AMP2 and a plug-in speaker.
With your Arty board unpowered, plug the PMOD AMP2 into the top row of header JD, and plug a speaker into the PMOD.
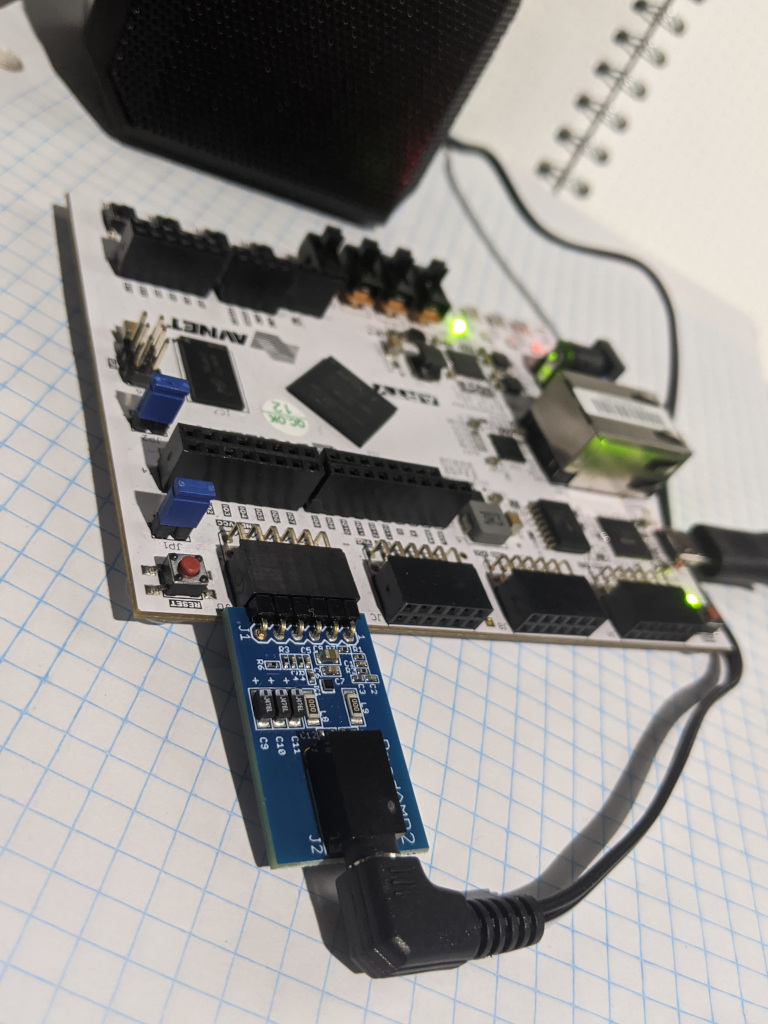
If you do not have a pmod2 (maybe you have a pmod3 in your kit, and it’s entirely incompatible), you can still get basic analog output by wiring amplified speakers between GND an JD pin#1 (jd[0] in the code). Note that, especially if you are using unamplified speakers, you should limit current, which is done automatically on JA and JD PMOD I/O pins but not on other outputs which would require an additional current limiting resistor.
Read through the first section of Music box 1 - Simple beep.
Now start a new project in pretty much the same you did before while following along to the Youtube video:
Start a new project in your $HOME/vivado directory
Copy in the .xdc file
In the XDC file, uncomment
CLK100MHz lines Clock lines
The switches - sw[0] to sw[3]
The leds - led[0] to led[3]
Under PMOD header JD, uncomment jd[0] to jd[3]
Use this Verilog:
module top(
// ***(A)***
input CLK100MHZ,
output [3:0] jd,
output [3:0] led,
input [3:0] sw
);
// ***(B)***
// first create an 18bit binary counter
reg [17:0] counter;
always @(posedge CLK100MHZ) counter <= counter+1;
// and use the most significant bit (MSB) of the counter to drive the speaker
wire speaker_out = counter[17];
// ***(C)***
// EITHER
// (1) you wish to annoy your neighbors, so send through the full speaker volume,
//assign jd[0] = speaker_out
// OR
// (2) just send through the 1/64th of the signal by only sending signal when last 6 bits of counter are zero
assign jd[0] = speaker_out & (counter[5:0] == 0);
// ***(D)***
// Set switch 3 to toggle shutdown pin, turning amplifier on and off.
// If you have housemates/family at home, you almost certainly need this
assign jd[3] = sw[3];
// ***(E)***
// LEDs to help with debugging
assign led[0] = speaker_out; // Current wave form
assign led[1] = jd[0]; // Attenuated signal sent to PMOD AMP
assign led[3] = sw[3];
endmodule
Note the differences between the above and the (much shorter) Verilog code on the FPGA4Fun site.
Note that this Verilog puts the variable types inside the module statement, but fpga4fun has them outside. Both work, but the way shown here is more modern.
We use an 18bit counter instead of a 16bit counter because we have a 100MHz clock rather than 25 MHz clock. If that doesn’t make sense, please ask.
If we just toggle the PMOD output pin so that it’s 50% on and 50% off , the result is really quite loud. Instead, we “&” the speaker_out wire with an expression so that speaker_out == 1 causes the speaker to be on only 1/64th of the time.
jd[0] corresponds to pin 1 on pmod connector JD.
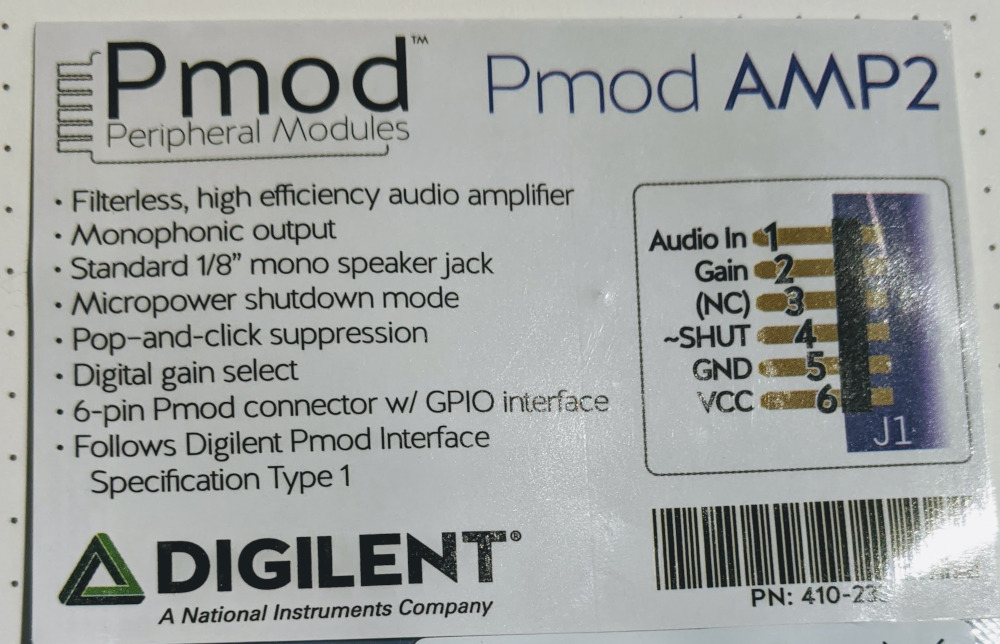
jd[3] needs to be set high to enable output - check the PMODAMP2 schematic, the SSM2377 datasheet and the PMODAMP2 packaging (below). We wire jd[3] to switch 3.
To help with debugging, we plumb through some signals to the LEDs.
Synthesize and implement the design, then program it.
Toggle switch 3 to turn the sound on and off.
Make sure you understand what is going on here, then proceed through the rest of the sound box tutorials.
Things to do:
Understand each example before moving onto the next.
Poke around in the GUI. Definitely “Open Implemented Design” at least once and try to figure out what you’re looking at.
See if you can figure out how to run Synthesis, Implementation and Bitstream generation with a single click. If you can’t, ask! Having to click three things that each take ~1minute to complete is painful.
Have fun.
Ask questions.
More on FPGAs¶
Now that you’ve mastered the Music Box tutorials. A few important points to recap.
- LUTs and FFs
The basic elements of an FPGA are Lookup Tables (LUTs), Flip Flops (FFs) and routing to move signals between LUTs and FFs.
LUTs are not clocked. Any signal applied to their input affects their output in a fairly short amount of time - measured in nanoseconds. They hold no state. Their outputs are only dependent on their inputs. LUTs can be chained together to produce complicated functions. However if there are many LUTs or there is a long route between LUTs in the chain, then calculating the result can take a long time.
- FFs are clocked
… meaning they can only change their values on clock transitions. In Verilog, the clock transitions are specified like this:
always @(posedge clock) <statement>
This code means that the assignments in <statement> take place on every positive edge of the <clock> signal. After the positive edge, then the value of the FF has changed and can affect other FFs on the next positive edge.
- Everything happens all the time, unless you say not to.
The way to enable logic sometimes and not others is to use an if statement:
always @(posedge clk)
if(counter==0) counter <= clkdivider-1;
- Verilog’s syntax is C-like, but it’s not C.
Expressions work mostly like C. However, the way state is treated is very different from a regular procedural language. There’s no need for loops, for instance.
- Counters are an important building block.
They are used to manage state. It is common to derive control signals from counters. A common pattern to do something periodically is:
always @(posedge CLK100MHZ)
begin
if(counter==0)
counter <= reset_value;
<< do something >>
else
counter <= counter-1;
end
Part 2: Amaranth Basics¶
We’re now going to dive into Amaranth, a Python based domain-specific language for writing gateware. At the lowest levels, it works much the same as Verilog. At the higher levels, it allows all the power of Python to be applied to generalizing, reusing and testing components.
Preparation¶
Ensure that you have git and virtualenv installed:
$ sudo apt install git
$ sudo apt install python3-virtualenv
Install the Fomu Toolchain
If using UPduino, you will need to install an iCE40 toolchain. We use the Fomu toolchain. Download the latest release of the Fomu Toolchain and extract it somewhere. (I just put mine directly under $HOME).
Create the virtualenv:
$ cd $HOME
$ virtualenv -p python3 amaranth-tutorial
Add an alias to your
.bashrcor.bash_aliasesfile:
pathadd() {
if [ -d "$1" ] && [[ ":$PATH:" != *":$1:"* ]]; then
export PATH="${PATH:+"$PATH:"}$1"
fi
}
VIVADO_BIN_DIR=/home/$USER/tools/Xilinx/Vivado/2020.1/bin
FOMU_DIR=/home/$USER/fomu-toolchain-linux_x86_64-v1.5.6/bin
alias startp='pathadd $FOMU_DIR;pathadd $VIVADO_BIN_DIR;source ~/amaranth-tutorial/bin/activate'
Execute the
startpalias to enter the virtual environment.Install Amaranth and gtkwave used for the tutorial
$ sudo apt install gtkwave
$ pip install --upgrade \
'git+https://github.com/amaranth-lang/amaranth.git#egg=amaranth[builtin-yosys]'
$ pip install --upgrade 'git+https://github.com/amaranth-lang/amaranth-boards.git'
$ pip install --upgrade 'git+https://github.com/amaranth-lang/amaranth-soc.git'
Hint
You may need to install udev rules
Vivonomicon Tutorial¶
Work through the Learning FPGA Design with Amaranth from vivonomicon
This is a big tutorial. Expect to spend at least half a day understanding what is going on. This tutorial was written with the UPduino as a target, but you could also use the Arty A7. See notes below. Before beginning, grab the sample code:
$ cd ~/amaranth-tutorial
$ git clone --branch updated_api https://github.com/alanvgreen/amaranth_getting_started.git
$ # make sure the virtualenv is activated with startp as explained above
This is a summary of the first commands in the tutorial to make sure everything is working:
$ cd amaranth_getting_started/hello_amaranth
$ python3 test.py
$ gtkwave test.vcd
$ # make sure you click the zoom out icon in gtkwave after enabling the signals to view
$ cd ../hello_led
$ python3 led.py
$ iceprog build/top.bin
Some notes:
the Amaranth API has changed slightly since this tutorial was written. See this PR for the required updates. Because the PR has not been merged the git clone command above will get you correct tree
Do not try to cut and paste the code bits in the tutorial, they contain the outdated non working code. Instead use hello_amaranth/test.py from the patched tree you just cloned.
You may notice that the different tutorials run so quickly that it’s hard to follow the sequence of lights. can’t see the sequences. Try to fix this by modifying the code. for hello_led, this is straight forward. For later tutorials you might want to try slowing down the main clock / oscillator like this:
# Replace this line
UpduinoV2Platform().build( dut )
# With these three lines
p = UpduinoV2Platform()
p.hfosc_div = 3 # Divide 48MHz high-freq oscillator by 8
p.build( dut )
In this tutorial, the author simulates designs and views the simulations through gtkwave. Gtkwave’s user interface is not exactly friendly.
Follow the instructions in the blog post to make signals viewable. You will need to both zoom out the timeline to fit the input and add signals to the viewer.
gtkwave takes some time to master, but it is an invaluable tool for tracking down certain types of error.
hello_led: the led flashes really fast. You can slow this down by increasing the delays in the code.
hello_mem: Sometimes the build will fail with errors similar to
ERROR: Max frequency for clock 'clk': 42.45 MHz (FAIL at 48.00 MHz).This means that in some part of the design, the signals are taking too long to get from one flip flop, through the routing and LUTs to the next flip flops.You can try changing the “seed” value for nextpnr. This will cause nextpnr to choose a slightly different starting configuration which may result in a different maximum clock speed.
It may be that the code is just attempting to do to much in a single cycle. Some ways in which you can reduce the work being done in a single cycle are:
When you get a delay instruction, instead of trying to handle the delay inline, transition to a separate DELAY state and wait until a counter reaches the appropriate value.
Changing the RETURN instruction to be only 0xffffffff instead of 0xffffffff or 0x0 might get you a slightly higher frequency.
Transitioning to a STEP state in order to increment the program counter (pc) might help as well.
Generally, take your time and experiment with the code - change constants and make sure it does what you think it should.
iceprog is part of the fomu tools.
hello_spi: the author warns of potential problems with flashing due to the SPI flash being accessed simultaneously by both the programmer and the FPGA. The author did not experience these problems, but you might.
Don’t forget there is an extra step in programming for this example:
python3 top.py -w && iceprog -o 2M prog.bin
python3 top.py -b && iceprog build/top.bin
If Using The Arty A7¶
The toolchain is much slower. Everything Takes Longer.
The code Should Mostly Just Work, but you will need to make a couple of replacements:
From |
To |
|---|---|
|
|
|
|
|
|
To program the Arty we use xcs3prog instead of iceprog:
$ xc3sprog -c nexys4 build/top.bit
alternatively get amaranth to call xc3sprog for you by adding do_program=True to the build() call:
ArtyA7Platform().build( dut, do_program=True )
The default Arty clock is 100MHz, much faster than the UPduino. You will need to adjust the timing to make the LEDs flash at rate slow enough to be perceived. We suggest making everything about 100x slower.
The Arty has 4 RGB LEDs. Go nuts
Recap¶
You now know how to:
Write basic Amaranth code
Simulate a design
Synthesize a design
Program a real device
Part 3: Test Driven Development with Amaranth¶
That tutorial was fun, but it was missing a vital piece: unit tests. Coupled with simulation, unit tests allow fast iteration without needing to deploy to hardware.
Since the UPduino doesn’t have any switches, we will use the Arty board for this code.
Edge Detection¶
In this tutorial, we make an edge detector. It will output a single cycle pulse whenever the input transitions from low to high.
Under ~/playground, make a directory named lights.
Create a skeleton file: ~/playground/lights/edge_detect.py
from amaranth import *
from amaranth.sim import Simulator
import unittest
class EdgeDetector(Elaboratable):
def __init__(self): ### (A)
self.input = Signal()
self.output = Signal()
def elaborate(self, platform): ### (B)
m = Module()
# TODO: Write code that works here
m.d.sync += self.output.eq(self.input)
return m
### (C)
class EdgeDetectorTest(unittest.TestCase):
def setUp(self): ### (D)
self.m = Module()
self.dut = EdgeDetector()
self.m.submodules['dut'] = self.dut
def test_simple_edge(self):
def process(): ### (E)
# TODO: Add test code here
yield
self.run_sim(process)
### (F)
def run_sim(self, process, write_trace=False):
sim = Simulator(self.m)
sim.add_sync_process(process)
sim.add_clock(1)
if write_trace:
with sim.write_vcd("zz.vcd", "zz.gtkw"):
sim.run()
else:
sim.run()
if __name__ == '__main__':
unittest.main()
Run “python edge_detect.py”. You should see the test pass.
There’s a lot of boilerplate here, but the code is straightforward. Let’s look at the marked sections of code:
The EdgeDetector class sets up two signals in its constructor. These will form its interface. In a real project, you would have comments or docstrings to document this interface.
The
elaborate()method sets the output based on the input.The test case is a standard Python unit test. Later, we’ll use the usual Python
self.assertXXX()methods to check the function behaves as expected.setUp creates a module to hold the model to be simulated. We make an EdgeDetector and assign to a variable named “self.dut”. Because it is a submodule, we add it to our list of submodules. “DUT” means “device under test”.
as we saw in the previous tutorial, Amaranth uses generator functions to drive the simulation.
process()is a simple generator function.run_sim()can optionally write a trace file. When debugging, it can be helpful to write a tracefile.
Here are the basic things you need to know about simulation driver processes:
The driver process does four things every tick:
Set values: Set input values for the next next tick, with a yield-something-something-eq statement.
Settle: Let input values be fully processed
Check values: check the outputs are as expected
Tick: Go to the next tick.
yieldis used to communicate with the simulator
# A yield statement with an eq assigns a value to a DUT input.
# However, the assignment doesn't take effect until after the next tick.
yield self.dut.some_input.eq(some_value)
# A yield statement with no parameters causes a clock tick:
yield
# A Settle() is used to ensure combinatorial outputs are completely processed
yield Settle()
# A yield expression returns a value from the DUT.
self.assertTrue((yield self.dut.some_output))
The simplest test we can do is to leave the input low (
0) and ensure the output remains low. Add this code to the test process:
def process():
for _ in range(10):
# Set inputs
yield self.dut.input.eq(0)
# Settle
yield Settle()
# Check outputs
self.assertFalse((yield self.dut.output))
# Tick
yield
Run the Python test.
Check that it passes.
Change the
assertFalsetoassertTrueand check that it fails.Note that the last line of the traceback show the line of code with the failing assertion.
Note that we don’t need to keep setting the input to zero since it remains constant. That line could go outside the loop.
Next, let’s change the code to modify the input to high and check that there is a single pulse on the output:
def process():
yield self.dut.input.eq(0)
for _ in range(10):
yield
self.assertFalse((yield self.dut.output))
# Set input
yield self.dut.input.eq(1)
# Tick
yield
# Input now available to DUT, no change yet
self.assertFalse((yield self.dut.output))
# Tick
yield
# DUT should output high for one cycle
self.assertTrue((yield self.dut.output))
# Tick
yield
# Output should now be back to low
self.assertFalse((yield self.dut.output))
Run this again. It will fail on the last line showing that the edge detector is not outputting a single pulse. There is an easy fix for this - implement the EdgeDetector:
def elaborate(self, platform):
m = Module()
last_input = Signal()
m.d.sync += last_input.eq(self.input)
m.d.sync += self.output.eq(self.input & ~last_input)
return m
Re-run the test. It should pass.
Write some more test functions:
Test that HIGH->LOW transitions are not detected
Test that multiple LOW->HIGH transitions are properly detected
Use a random number generator to test 100 low-high-low transitions in a row, but with varying amounts of time at high and low values between them.
For this last test, output to a VCD trace file and look at it in gtkwave.
Toggle an LED¶
We just wrote and tested an abstract module without hardware! Hooray! Now, let’s create a Top() and deploy it to a real Arty board.
In a file named edge_top.py, put:
from amaranth import *
from amaranth_boards.arty_a7 import *
from edge_detect import EdgeDetector
class Top(Elaboratable):
def elaborate(self, platform):
m = Module()
### (A)
button = platform.request('switch', 0)
led = platform.request('led', 0)
### (B)
detector = EdgeDetector()
m.submodules += detector
### (C)
m.d.comb += detector.input.eq(button.i)
with m.If(detector.output):
m.d.sync += led.o.eq(~led.o)
return m
if __name__ == "__main__":
platform = ArtyA7Platform()
platform.build(Top(), do_program=True)
This ought to look quite familiar. A couple of things to note:
These resources are defined in arty_a7.py. Note that, amongst other things, there are 4 buttons, 4 switches, 4 LEDs and 4 RGB LEDs accessible.
When creating the
EdgeDetector()module, we must also add it to the module’ssubmodules.Button zero is comb’ed through to the detector input. Note that the LED is toggled every cycle that the detector outputs ‘1’. It is very convenient that the detector only outputs ‘1’ for a single cycle when an edge is detected.
Run it to synthesize the design and program the Arty.
Wait around for this to finish. Notice how long it takes and remember how much quicker and more productive it felt to be iterating with unit tests instead.
Get bored of waiting and make a cup a tea.
Has it finished? Toggle switch zero a couple of times, and note that one of the LEDs toggles on and off. Also note that only the low-high transition of the switch causes the LED to change.
Amaranth: Finite State Machines¶
We’re going to make a small example design that outputs colors in response to button presses. In order to avoid long waits for the FPGA toolchain, we’ll develop using test cases.
Let’s begin by implementing a finite state machine with * three inputs: up, down and reset * three outputs: red, green and blue
The states, in order are: #. Red #. Green #. Blue #. Yellow (red and green) #. Cyan (green and blue) #. Magenta (blue and red)
‘up’ causes the states to cycle red->green->blue->yellow etc. ‘down’ goes in the reverse direction. ‘reset’ goes back to the starting state, which is red.
Step 1. Make a new file¶
Begin a new Python file called color_stepper.py.
Copy in the same skeleton file as used for edge_detect.
Global search and replace “EdgeDetector” with “ColorStepper”
Run the code to make sure it still works
In the module __init__() function, replace self.input and self.output with
up,down,reset,r,gandb. Maybe add some comments to explain what they do.Run the code to make sure it still works
It doesn’t
Write a simple process() function with just enough to get a test case running. (Hint: you will need one working sync statement)
Step 2: Simple Unit Test¶
In color_stepper.py, replace the test_simple_edge test with a test
named test_initial_value().
Check that r is high (meaning == True), g is low (meaning == False) and b is low.
Run the test. It will fail.
To make it work we need to set a default, initial value for self.r. Do it like this:
self.r = Signal(reset=True)
Check your test now passes
Step 3: Transitions, TDD style¶
Now that the basic class structure is in place, we can begin to write tests, then build the functionality that makes the tests pass. This is Test Driven Development (TDD).
Make a new test method named
test_up_one.Check that setting ‘up’ for a single cycle causes a transition from Red, to Green
You can make a function like this to check RGB values:
def check_rgb(self, expected_r, expected_g, expected_b):
self.assertEqual(expected_r, (yield self.dut.r))
self.assertEqual(expected_g, (yield self.dut.g))
self.assertEqual(expected_b, (yield self.dut.b))
then call it with:
yield from self.check_rgb(1, 0, 0)
Hint
Calling with “yield from” is important since it is a generator function, and you want the yields inside it to work correctly. If you forget the yield from, there is no error message or other indication, apart from the asserts not being run
Hint
remember the “check values, settle, set values, yield” pattern.
To make the state transition work, we’re going to use a finite state machine, aka “FSM”:
def elaborate(self, platform):
m = Module()
def set_rgb(red, green, blue): # ***(A)***
m.d.sync += [
self.r.eq(red),
self.g.eq(green),
self.b.eq(blue),
]
with m.FSM() as fsm: # ***(B)***
with m.State("RED"): # ***(C)***
with m.If(self.up):
set_rgb(0, 1, 0)
m.next = "GREEN" # ***(D)***
with m.State("GREEN"): # ***(E)***
pass
return m
Notes:
Since we will be setting of r, g and b from many places, we make a helper function.
This is how FSM’s are declared. Try not to nest FSMs in the one module.
The first FSM state is the default. You can also set a default by using the
reset=parameter of the FSM() function.m.next sets the state on the next clock cycle. set_rgb() likewise sets the values of r, g, and b for the next clock cycle.
There is no way out of the “GREEN” state yet.
Paste the above code in. Run your test case. Make changes until your test case until it passes.
Step 4: up Transitions¶
Add test cases to test each of the other up transitions.
It’s just Python: If you find yourself repeating code (and you ought to), then refactor!
Implement the module until the up transitions pass.
You can use gtkwave to help debug failures. Handily, it shows FSM states as strings.
It’s just Python #2: you can use standard python debugging tools to debug code generation and test cases. Use
breakpoint()and step through code to find the cause of test case failures.It’s just Python #3: you can also use
print()in test cases.
Step 5: down and reset transitions¶
Do the same to make down and reset work: test then implement
Refactor the implementation as you find repeated code.
Step 6: Comprehensive Testing¶
Add a test case that walks the state both up and down in the same test
case. Iterate until all tests pass.
Step 7: Refactor¶
Congratulations, it works!
Look back at your code. Are there repeated sections that you could refactor?
Step 8: Use Your Component on Hardware¶
Now create a
color_top.pyfile that glues together the color stepper, with input from 3 switches, via edge detectors and output to one of the rgb leds.We recommend doing this yourself - start by copying your edge_top.py.
For reference, this code worked for us:
from amaranth import *
from amaranth_boards.arty_a7 import *
from edge_detect import EdgeDetector
from color_stepper import ColorStepper
class Top(Elaboratable):
def elaborate(self, platform):
m = Module()
def edge_button(n):
m.submodules[f"detector_{n}"] = detector = EdgeDetector()
button = platform.request('button', n)
m.d.comb += detector.input.eq(button.i)
return detector.output
rgb = platform.request('rgb_led', 0)
m.submodules["stepper"] = stepper = ColorStepper()
m.d.comb += [
stepper.up.eq(edge_button(0)),
stepper.down.eq(edge_button(1)),
stepper.reset.eq(edge_button(2)),
rgb.r.o.eq(stepper.r),
rgb.g.o.eq(stepper.g),
rgb.b.o.eq(stepper.b),
]
return m
if __name__ == "__main__":
platform = ArtyA7Platform()
platform.build(Top(), do_program=True)
Note
You could, if you wanted to, write an integration test for the top module. For a large project, I might do that, but for this tutorial, it’s fine to skip.
Amaranth: Memory¶
Amaranth provides an abstraction called Memory which is useful for building small, fast memories. The toolchain will choose exactly how it is implemented: usually with bare flip flops if there’s only a few bits or with block ram (BRAMs) for larger memories.
These small, local memories are important for evaluating ML operations. Many of them can be used in parallel, caching input data and intermediate values and so greatly reducing the bandwidth load on main memory.
As shown in the following diagram a typical Amaranth memory has:
- a read port.
Every cycle, the given address lines are read and the next cycle, the data stored at that address is output on the data lines
- a write port.
If Write Enable is high, then the address and data lines are read. The next cycle, the data will be stored at the address.
These two ports operate independently - can read and write simultaneously, and even on separate clocks.
We’re going to use a Memory to provide a delay. Building on our color stepper example, we’re going to have a second LED mirror the first, except with a two second delay.
To do this we’ll make a 3 bit wide, 1000 deep RAM to record the RGB values from
one LED. We’ll write this value to location ADDR. The second LED will get
its value from location ADDR+1. Every 0.002 seconds, we’ll increment
ADDR. Thus, with 2ms accuracy, the second LED will be lit with the same
values as the first LED was 2 seconds ago.
In this next diagram we show that at time ‘t’ here we are reading from cell 334 and writing to cell 333. The data at cell 334 was written 999 time units ago.
At time ‘t+1’, we’ll overwrite the data at 334 with write and read from cell 335:
By varying the depth of the RAM, and the amount of time between increments of the read and write addresses, we can vary the time delay and accuracy of the delay.
Step 1: New Module¶
Create a new skeleton module, Delayer. Put it in delay.py. Also include the
DelayTest.
Input is 3 bits. You can either make this a single Signal(3) or else 3 separate Signal()s. Signal(3) is probably more convenient in this case, but it’s up to you.
Output is 3 bits. Make the format consistent with the input.
The Delayer constructor should also accept two parameters:
depth - the number of memory addresses there will be
delay_cycles - the number of cycles between increments of the read and write pointers.
Run your skeleton module + skeleton test case.
Step 2: Writes Tests and Implementation¶
In your test case, instantiate the Delayer with a small memory with a small delay. You could instantiate a full 1000 slot memory with (100M cycles/second * 0.002s =) 200,000 cycle delay, but it would take a LOOONG time to simulate anything interesting. Start with depth=5 and delay_cycle=10, and see how long it takes.
Now add tests and write implementations until the tests pass. Here’s how to instantiate a memory with read and write ports:
mem = Memory(width=3, depth=self.depth)
m.submodules["read_port"] = read_port = mem.read_port(transparent=False)
m.submodules["write_port"] = write_port = mem.write_port()
The “transparent=False” argument gives the best performance, and you should always this parameter unless you find that it does not meet your needs.
Explicitly naming the submodules, using
m.submodules[NAME]makes it easier to find them in gtkwave and - later - the generated Verilog.
Further hints:
The memory implementation is in mem.py. The comments there are helpful.
The bit_length() method is useful for calculating the size of Signal()s
Cat() is useful for joining signals together, for example if you wanted to make a single Signal(3) from an r, a g and a b signal. You can both assign to and from a Cat()ted signal
use the gtkwave output to debug
make a
write_addrsignal which keeps the current write address and aread_addrsignal which holds the read address - which also happens to be the next value for addr when it is incremented.
And spoilers (don’t read unless you’re stuck):
implement the delay as a counter
increment the
write_addrwhenever the delay counter rolls over to zero‘comb’ write_port.en to 1
‘comb’ addr and addr_next to write_port.addr and read_port.addr
‘comb’ the input and output to read_data.data and write_data.data (but think about the direction of the assignment!).
After you have a working implementation you can try a few different settings for simulated memory size. At what size does the speed of the simulation become noticeable or annoying?
Step 3: Run on Hardware¶
This process should be quite familiar by now.
Create
delayer_top.py, by copyingcolor_top.pyand adding to it.Ensure the output of the Stepper goes both to the first LED and to the input of a Delayer.
Configure the Delayer for 1000 depth and a 2ms delay
‘comb’ the output of the Delayer to a second LED.
Run.
Watch the second LED mimic the first on a two second delay.
Now wire in two more delayers in cascade, so that 4 RGB LEDs are working at 0, 2, 4 and 6 seconds delay.
The LEDs are very bright. Try adding a module to dim them. Don’t forget the test case! Hint: dimming the LEDs will be similar to making the speaker volume lower.
Things To Do Now¶
You now know enough Amaranth to do quite a bit. If you’d like to experiment further, you could:
reimplement the FPGA4Fun beep tutorials in Amaranth.
Pick up other examples from FPGA4Fun
Move on with CFUs!